
Travaux Personnels Encadrés
Technologie et sécurité routière

Les différents capteurs de notre étude
Capteur 1 : La caméra numérique classique
La caméra classique numérique est en fait un capteur CCD. Ce dispositif permet de transformer une quantité de lumière en charge électrique. Plus la lumière est intense, plus la charge électrique délivrée est forte. Ce dispositif a été inventé par George E. Smith et Willard Boyle dans les Laboratoires Bell en 1969. Cette invention leur rapportera le Prix Nobel de physique en 2009.

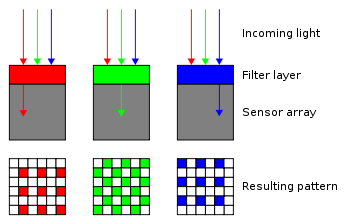
Pour permettre la colorimétrie (mesure de la couleur), on utilise la technique du filtre de Bayer. Ce dispositif a été inventé par Bryce E. Bayer de la société Eastman Kodak. Son principe est de positionner un filtre ne laissant passer qu’un type de couleur à la fois – rouge, vert ou bleu – au-dessus de chaque élément du capteur CCD. Il en résulte que le capteur CCD est capable de mesurer 3 composantes RVB et de la numériser. C’est le traitement ultérieur de ces données qui rend la représentation visuelle possible sur un écran.
La caméra numérique classique est le capteur d’image principal du véhicule. Il apporte une information essentielle qu’il convient d’améliorer par d’autres dispositifs de captage.
Capteur 2 : La caméra numérique thermique
Il existe 2 types de détecteurs infrarouges : les détecteurs quantiques et les détecteurs thermiques. Les détecteurs quantiques sont plus rapides, mais sont plus chers notamment à cause de leur nécessité d’être refroidis. Les détecteurs thermiques sont courants et bons marchés mais leurs temps de réponses sont de l’ordre de 1000 fois supérieurs au détecteurs quantiques.

Le recours à cette technique de détection est particulièrement utile pour la réalité augmentée puisque l’œil humain n’est pas capable de voir ces informations. L’addition de ces informations avec d’autres permets justement de mettre en évidence et de surreprésenter certaines données.

Capteur 3 : La télémétrie
Il faut pouvoir mesurer la distance de tous les objets se trouvant devant le véhicule. Là encore, la technologie récente vient à notre secours. Nous allons utiliser un « télémètre à nuage de points ». Le principe est de scanner l’ensemble des points se trouvant dans notre portée visuelle avec une illumination infra-rouge. Le temps de propagation de l’onde projetée nous donne une valeur de distance entre notre véhicule et les obstacles.

Ci-dessus, plus l'objet est proche, plus il est surreprésenté.
Nous pouvons même améliorer ce système en utilisant le principe du cinémomètre. Par l'exploitation de l'effet Doppler, le cinémomètre peut nous indiquer la vitesse relative de l'objet par rapport à notre véhicule. La encore, en agrégeant « l'information de vitesse de notre véhicule », « l’information de vitesse relative des obstacles » et « la courbe de freinage de notre véhicule », nous pouvons alors donner une information surreprésentée ayant une grande valeur informationnelle.
Nous pouvons même améliorer ce système en utilisant le principe du cinémomètre. Par l'exploitation de l'effet Doppler, le cinémomètre peut nous indiquer la vitesse relative de l'objet par rapport à notre véhicule. La encore, en agrégeant « l'information de vitesse de notre véhicule », « l’information de vitesse relative des obstacles » et « la courbe de freinage de notre véhicule », nous pouvons alors donner une information surreprésentée ayant une grande valeur informationnelle.
Capteur 4 : La position de l'oeil directeur du conducteur
Pour que le conducteur ait la meilleure représentation visuelle possible et qu’il n’y ait aucun problème de parallaxe, nous devons connaitre en permanence la position de son œil directeur. Pour cela, nous utilisons une caméra classique couplée avec un outil de reconnaissance de forme et un télémètre.
Il nous importe de connaitre cette position par rapport au repère orthonormé à 3 dimensions dans lequel l’ensemble de notre système se place.
Il nous importe de connaitre cette position par rapport au repère orthonormé à 3 dimensions dans lequel l’ensemble de notre système se place.
